|
CATIA V5 Kinematik DMU : Transfer von Bauteilen mit Roboter
HolländerD am 03.05.2007 um 11:04 Uhr (0)
Markus,vermutlich ist für Deine Aufgabenstellung eine Lösung mit dem von Michel01 angesprochenen Tool möglich. Für eine Mehrkörpersimulation bräuchtest Du eine Art CATIA Add on (Dassault bietet dazu keine eigene Lösung). Damit wäre es dann wie gesagt auch möglich die tatsächlichen Masseneffekte zu berücksichtigen. Ich könnte mir vorstellen, daß es beim Anfahren verschiedener Positionen zu einer Art von ungewollten Überschwingen des Robotors (bedingt durch Trägheiten) kommen kann. Diese sind durch eine rein ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Einheiten ändern in den Sensors Graphical Representation ??
Catrin am 26.10.2008 um 11:38 Uhr (0)
Hallo Johnny, Zitat:Original erstellt von JohnnyNash:kann man in der graphischen Ausgabe der Sensoren irgendwie die Einheiten ändern lassen? Aus M/sec möchte ich bspw. mm/sec haben.soweit ich weiss, ist dies nicht moeglich.Die Einheiten muessen schon vn vornherein in den Einstellungen im CATIA geaendert werden. Zitat:Original erstellt von JohnnyNash:Zweite Frage: Ist es möglich, sich die y-Achsen der anderen Sensoren gleichzeitig mit einblenden zu lassen, so dass man alle relevanten Informationen in einem ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
 |
CATIA V5 Kinematik DMU : Kugelgelenk 1 Freiheitsgrad immer offen
Tonemann am 09.11.2012 um 18:13 Uhr (0)
Hallo Leute,ich hoffe die Experten unter euch können mir helfen bzgl. einer Kinematik in CATIA.Im Anhang seht ihr einen vereinfaschten Flansch zur Volumenstzromregulierung. Der gelbe Ring kann um seine eigene Achse auf dem Gehäuse drehen. Der Ring wiederum ist über ein Hebel (Koppelgelenk) mit einer Sperre verbunden, die wiederum den Volumenstrom regelt.Meine angebrachten Verbindungen seht ihr im Screenshot. Ich habe nun das Problem, dass ein Freiheitsgrad offen ist und somit der Mechanismus nicht simulier ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
 |
CATIA V5 Kinematik DMU : Punkt als Antrieb definieren - Kinematik
Muckenbatscher am 31.07.2013 um 13:55 Uhr (15)
Hallo!nach langem durchforsten auf eine Antwort zu meiner Frage hier im Forum bin ich nicht fündig geworden und muss nun meine Frage extra stellen. Ich möchte gerne für eine Studienarbeit eine Radaufhängung in Catia V5 R19 simulieren. Hierzu möchte ich das Ein-/Ausfedern eines Rades definieren. Während der Simulation sollen dann auch noch Messwerte aufgenommen werden. Zu meinem Problem: Im Bild sieht man das Rad, dessen Radmittelpunkt die Koordinaten x=2301mm y=-751,5mm und z=318mm hat. Ich möchte jetzt nu ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Simulation mit mehreren anhängigen Teilen
robie125 am 10.03.2004 um 22:03 Uhr (0)
Hallo, zizo genau das habe ich eigentlich machen wollen. Das Problem dabei besteht nur darin, das sich die nockenwellen nicht mehr anwählen lassen nach dem sie beide mit ihrer eigenen Zahnradverbinding in beziehung gesetzt wurden. grundsätzlich ist es also erst mal möglich Kurbelwelle mit Nockenwelle zu verbinden ohne das eine mechanische Verbindung besteht? Die beiden Nockenwellen sind nämlich wirklich mit zwei Zahnrädern verbunden. Ich dachte das das eventuel vorraussetzung sei ;-) und Catia das mertkt, ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Revolute / Rotate um Achse erzeugen
derMartin am 26.04.2011 um 14:51 Uhr (0)
Du brauchst für den Revolute-Joint zwei Achsen - eine in jedem der beteiligten Körper. Über diese Achsen wird definiert, wie sich die Körper relativ zueinander drehen. Stell Dir das als Zylinderachse in einem und als Bohrungsachse im anderen Körper vor.Außerdem benötigst Du zwei Ebenen bzw. ebene Flächen (wieder je eine Ebene in jedem Körper), die quasi als Anlageflächen dienen. Voraussetzung ist, dass diese Flächen senkrecht zu den Achsen stehen.CATIA richtet die beiden Körper bei der Erzeugung des Joints ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Hilfe beim Pumpenzusammenbau
Rekrom am 16.06.2011 um 07:41 Uhr (0)
Hallo Zusammen,ich bin nue hier und mit catia mache ich meine ersten Kinematik versuche. Ich muss eine Pumpe zusammenbauen, bei der ich einfach nicht weiter kommen. Vielleicht könnt ihr mir helfen? Ich habe eine Welle,Zylinderblock,Verteilerscheibe(gelb),Steuerscheibe(grün) und erstmal nur einen Kolben(werden insg. 9). Ich habe alle Teile zusammengebaut und bis zu den ersten 4 Teilen schaffe ich es, dass mein Mechanismus nur einen Freiheitsgrad hat und ich kann ihn simulieren. Sobald ich aber den Kolben e ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Kinematik + Änderung im Part
RobiX am 17.06.2009 um 10:35 Uhr (0)
Hallo zusammen,ich habe folgendes Problem:Ich möchte eine Art Andrückmechanismus auf ein Stahlcoil simulieren. Hierzu verwende ich ein Skelett in dem das Coil durch einen Kreis und der Andrückmechanismus auf der Coilseite durch einen Punkt vereinfacht sind. Dieser Punkt soll nun auf der rotierenden Kurve laufen. Soweit noch kein Problem. Allerdings soll jetzt der Kreisdurchmesser während der Simulation abnehmen, eventuell um einen gewissen Wert pro Zeiteinheit. Habe versucht dies über Parameter zu steuern, ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
 |
CATIA V5 Kinematik DMU : Simulation mit Regeln + Wiedergabe als .avi generieren
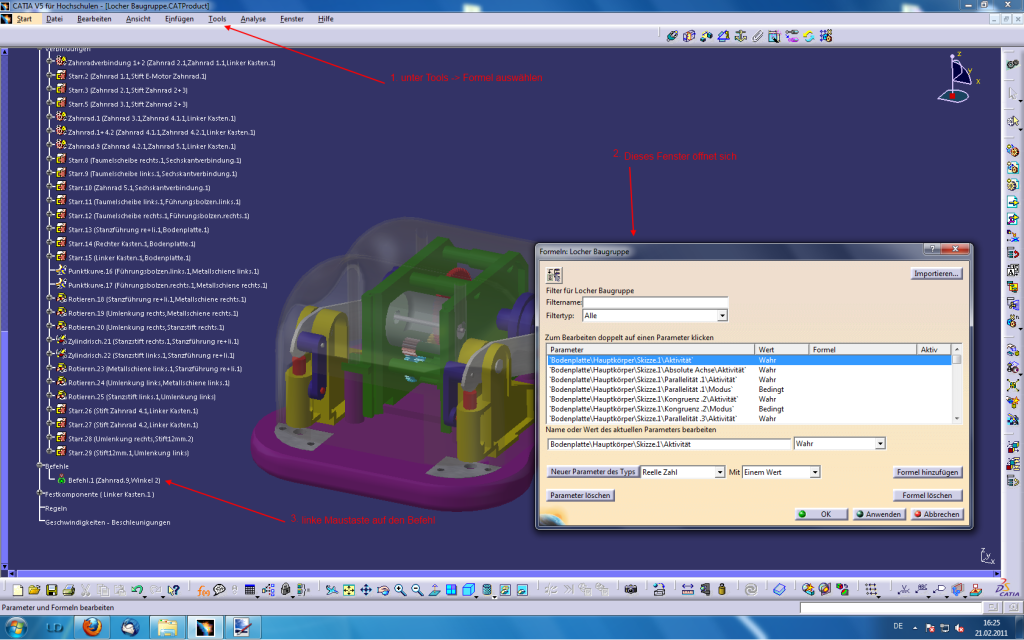
Fhdoia am 21.02.2011 um 17:05 Uhr (0)
Hallo.Ich möchte gerne eine avi-Datei (Wiedergabe) einer Simulation erstellen.Hierzu gehe ich wie folgt vor:1)"Tools" -- "Formel" -- unter Applications den Befehl auswählen2)Formel hinzufügen auswählen3)dann "Parameter" -- "Zeit" -- Doppelklick auf "Zeit" (rechts daneben)-- /1s*360deg eingeben4)Es wird im strukturbaum eine Regel angelegt5)Wenn ich in Catia jetzt Simulation anwähle öffnet sich folgende EingabeMaske (mit den Fragezeichen) - ich denke hier liegt mein Fehler bzw. es fehlt auch noch Verständnis ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Überschneidungserkennung
corso am 12.10.2004 um 15:15 Uhr (0)
Hallo zusammen! Das Kinematikmodul bietet einem doch die Möglichkeit, Überschneidungen zu erkennen und im Geometriebereich darzustellen. Hierfür gibts rechts ja auch die Symbolleiste Automatische Überschneidungserkennung . Dies funktioniert prima, wenn ich einen importierten V4-Mechanismus simuliere (mit Befehlen oder mit Regeln), oder aber eine V5-gespeicherte Simulation oder ein Replay verwende. Nur wenn ich Simulieren mit Befehlen oder mit Regeln bei einem V5-Mechanismus anwähle, wird die ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Federlänge animieren
Muks am 04.01.2009 um 23:02 Uhr (0)
Also ich hab das Problem jetzt so geklärt: ich habe alle zu animierenden Baugruppen als einzelne stp-files in CATIA gespeichert und dann im Invenor eine neue Baugruppe erstellt und all diese stp Dateien in der entsprechenden Form wieder zur gesamten Baugruppe zusammengesetzt. Danach habe ich hier im Forum nach den Inventor-Anleitungen für flexible Federn gesucht und nach diesen Anleitungen im Inventor die Federn erstellt. Ich habe mich für diesen Schritt aus folgenden Gründen entschieden:- Erstellung flexi ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Sub-Mechanismen importieren tut nicht
T.Felbermair am 21.01.2005 um 07:47 Uhr (0)
CATIA V5 R12 SP6 HP-UNIX oder WIN XP Hallo zusammen, ich möchte in mein Product in Kinematic einen Sub- Mechanismus importieren. Nach dem ausführen des Befehls, kommt dann auch die Meldung Sub- Mechanismus erfolgreich importiert. Wenn ich allerdings die Kinematik anschließend simuliere, bewegt sich nur der Mechanismus, nicht aber die im Unterproduct mit Dressup angehängten Komponenten. Wenn ich dieses Product separat öffne, funktioniert es einwandfrei, - der Mechanismus und die mit Dressup angehängten K ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Point-Surface-Joint bleibt stehen
2s-steffen am 02.12.2004 um 16:26 Uhr (0)
Hallo, folgende Problematik: Ich habe eine voll funktinierende Kinematik aufgebaut aber sobald der beinhaltete Point-Surface-Joint an die alte Begrenzung meiner zusammengesetzten Fläche (Join) stößt hält die Kinematik an und muß neu angestoßen werden, damit sie auf der angrenzenden Teilfläche Weiterläuft. Sieht im Ablauf aus als hätte die Kinematik einen Totpunkt!! Die betreffende Fläche habe ich auch schon als Healing erstellt um sicher zu sein, dass keine Lücke entstanden ist. Bei der Kontrolle hatte ich ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |