|
CATIA V5 Kinematik DMU : Roboterarm über ExcelMatlab steuern
bgrittmann am 01.07.2011 um 13:51 Uhr (0)
Servus Zitat:ps.: ich kann dein beispiel mit catia nicht öffnen v5r18 sp8Ich hatte gehofft, dass 3dxml-Dateien Releaseunabhängg sind. GrußBernd------------------Warum einfach, wenn es auch kompliziert geht.
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Roboterarm über ExcelMatlab steuern
Fhdoia am 01.07.2011 um 12:11 Uhr (0)
ich hab vergessen zu erwähnen dass ich insgesatm nur 4 achsen benötige.also die 3 achsen unten plus die vorderste achse, damit sich der effektor neigen kann.der professor bei dem ich dieses thema behandeln will hätte das aber ganz gerne mit matlab glaub ich, deswegen wäre eine lösung damit schon ganz gut.aber ich werde mal dein vorschlag mal ausprobieren bgrittmann!hast du eine idee wei man das dann mti matlab/excel realisiert?ps.: ich kann dein beispiel mit catia nicht öffnen v5r18 sp8grüße[Diese Nachric ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Lizenzen
ReneLindner am 10.06.2013 um 15:29 Uhr (0)
Hey Leute.Ich hab ne Frage wegen den nötigen Lizenzen von Catia für meine Kinematik. Ich arbeite auf einer Studentenversion und brauche die Lizenz dann mal für die Firma, um es offiziell zu machen - da es die Diplomarbeit betrifft !Ich muss im DMU Kinematik meinen Mechanismus erzeugen können, simulieren können über einen importierten Befehl und analysieren können - also Kollisionsanalysen, Abstandsanalysen etc. mit den Sensoren mit Ausgabe in einer Excel oder und der Grafik.Reicht da eine YM2 + KIN ?!?!Od ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Kinematik eines Gelenkkopfes
ogard1 am 19.11.2009 um 11:30 Uhr (0)
Hallo,falls Buch "Bewegungssimulation mit CATIA V5" Hanse Verlag zur HandKapitel 3 - Ueb. 3.25 Einzelradaufhaengung mit SimulationFalls gewünscht kann ich das Produkt hochladen!Gruß[Diese Nachricht wurde von ogard1 am 19. Nov. 2009 editiert.]
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Verfahrweg aus einer Kombination von Bewegungen
hklein06 am 25.04.2006 um 14:44 Uhr (0)
Danke, aber das ist nicht mein Problem.Ich habe drei Mechnismen, die über drei Simulationen gesteuert werden. Diese drei Simulationen habe ich mit einer Sequenz verbunden(anders geht es leider nicht).Nun benötige aus diesem kompletten Ablauf einen Trace.So wie es aussieht geht das wohl nicht mit CATIA...Viele Grüße,Holger
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Geschwindigkeit und Beschleunigung von Drehbewegung messen
bgrittmann am 11.05.2010 um 22:39 Uhr (0)
ServusAFAIK braucht du kein polares Kooridinatensystem (gibt es in CATIA auch nicht, oder nur in FEM??)Wenn du eine "Geschwindigkeits- Beschleuigungsanalyze" erstellst wird automatisch zu gewählten Achsensystem auch die Drehung7Beschleunigung um alle drei Achsen ermittelt.GrußBernd------------------Warum einfach, wenn es auch kompliziert geht.
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Winkel aus Excel Tabelle importieren
moppesle am 22.05.2014 um 14:35 Uhr (1)
Hallo Muckenbatscher,Danke für die Rückmeldung.Wo könnte man hierfür noch Infos ziehen?------------------Gruß UweAuch Catia ist nur ein Mensch!
|
| In das Form CATIA V5 Kinematik DMU wechseln |
 |
CATIA V5 Kinematik DMU : Catia V5 DMU Kinematics
Logit3ch am 16.01.2016 um 16:43 Uhr (15)
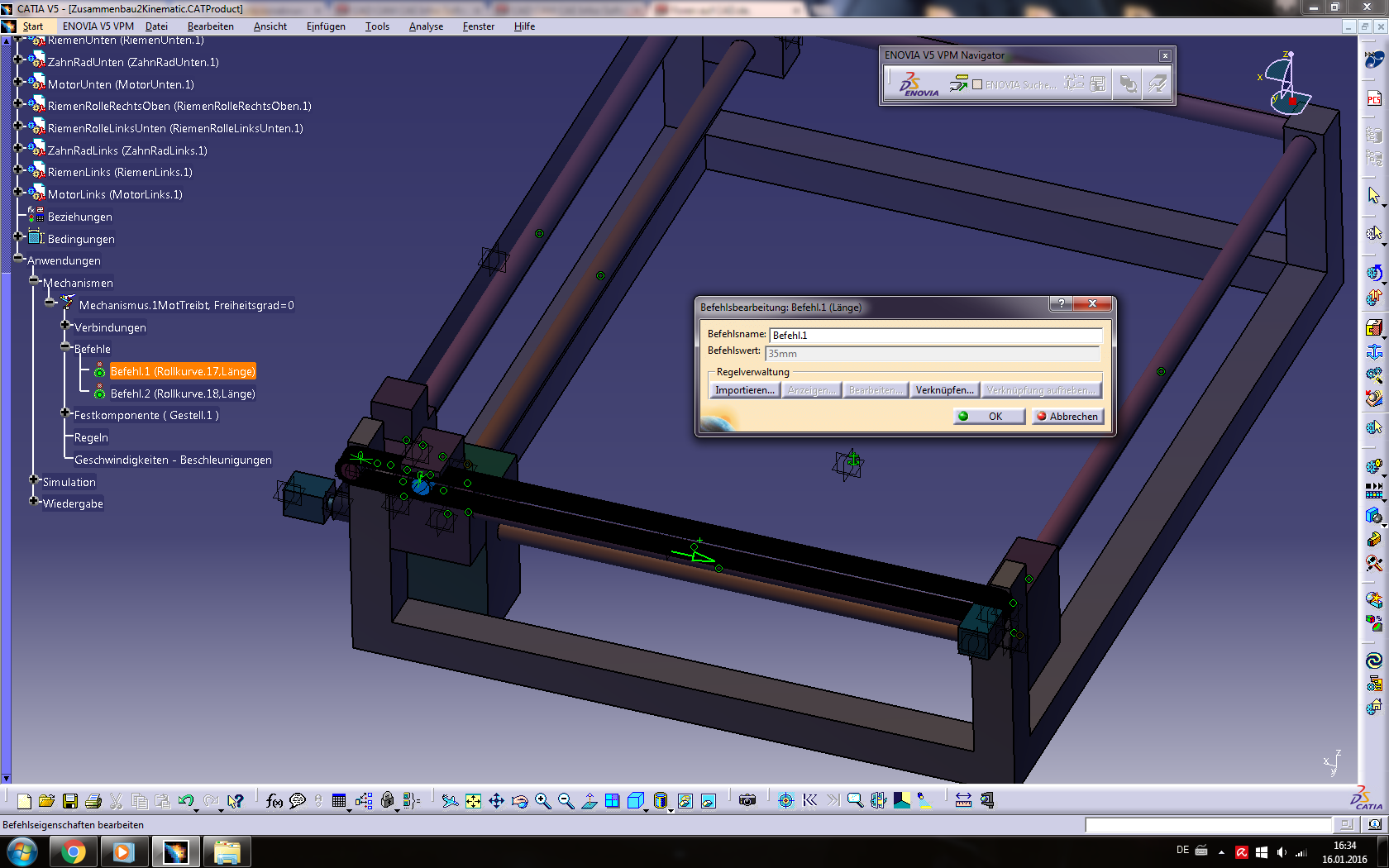
Hallo,ich habe ein Problem, bei dem ich leider am verzweifeln bin!Und zwar möchte ich gerne die folgende Stellung (siehe Bild) als Nullpunkt definieren.Leider habe ich bei mir nicht die Möglichkeit, auf "Auf Null zurücksetzen" zu klicken.Kann mir einer sagen woran das liegt?Ich habe bei den zwei Rollkurvenverbindugen meine Grenzen eingestellt. Aber sobald ich mit Regel simuliere, verfährt der Druckkopf( es soll ein 3D Drucker werden) außerhalb des Rahmens. Ich verstehe leider auch nicht warum.MfG
|
| In das Form CATIA V5 Kinematik DMU wechseln |
 |
CATIA V5 Kinematik DMU : Catia V5 DMU Kinematics
Logit3ch am 16.01.2016 um 17:03 Uhr (1)
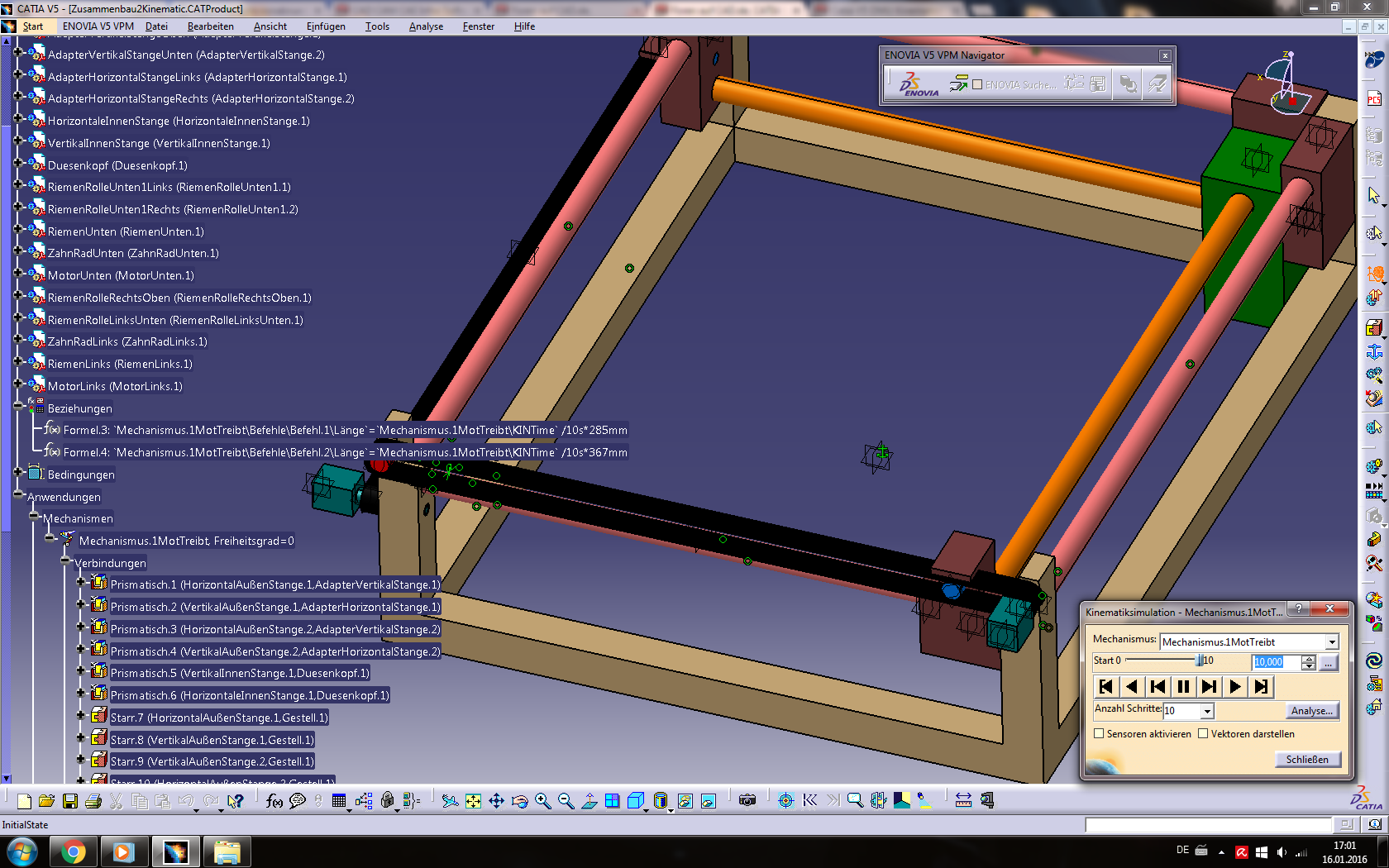
Das meinte ich (siehe Bilder).Obere Grenze akzeptiert er, aber wenn man auf Position 0 fährt, fährt er nicht auf meine begrenzte 35mm x Achse und 30mm y Achse.
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Catia V5 DMU Kinematics
thomasacro am 16.01.2016 um 22:23 Uhr (1)
Hi du und willkommen im forum.Wo genau versuchst du auf null zurückzusetzen?Hab gerade meinen rechner nicht an, aber versuch mal zuerst von SIMULATION WITH LAWS (was bei dir gerade an ist) auf SIMULATION WITH COMMANDS umzustellen. Bin mir aber nicht ganz sicher....------------------gruß, Tom
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Catia V5 DMU Kinematics
Logit3ch am 16.01.2016 um 23:39 Uhr (1)
Hallo,meine Ausgangspostion soll die Position sein, die im ersten Beitrag auf dem Bild zu sehen ist.Simulation mit Befehlen funktioniert einwandfrei, so wie ich die Grenzen eingestellt habe.Allerdings wenn ich mit Regeln simuliere, fährt der Druckkopf viel weiter als 35mm in der x Achse und 30mm in der Y Achse.Ich muss leider mit Regeln simulieren, da ich die Geschwindigkeit messen soll.MfG
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Catia V5 DMU Kinematics
thomasacro am 17.01.2016 um 00:10 Uhr (1)
Wie lauten denn die Regeln, die die Motoren steuern?Also Wie hast du die "KINTime" mit den Motoren verknüpft?------------------gruß, Tom [Diese Nachricht wurde von thomasacro am 17. Jan. 2016 editiert.]
|
| In das Form CATIA V5 Kinematik DMU wechseln |
 |
CATIA V5 Kinematik DMU : Catia V5 DMU Kinematics
Logit3ch am 17.01.2016 um 22:32 Uhr (15)
Hallo,vielen Dank für Deine Antworten! Ich habe das Problem in der Nacht noch gelöst.MfG
|
| In das Form CATIA V5 Kinematik DMU wechseln |