|
CATIA V5 Kinematik DMU : Wertetabelle
Vaxl am 17.03.2017 um 10:46 Uhr (1)
hallo klaus,ich habe mir auch gerade deine datei angesehen. wie stellst du den lesezugriff zur Wertetabelle her? ich finde da keinerlei parameter oder regel dafürLG Valentin------------------Catia V5 R26
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Wertetabelle
Vaxl am 17.03.2017 um 11:05 Uhr (1)
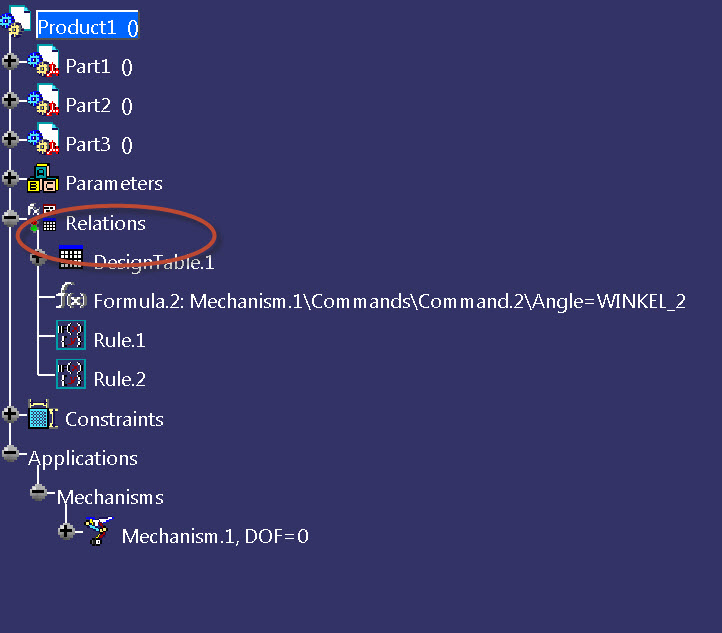
ich habe die lizenz (also kann zumindest regeln schreiben), aber ich finde nix im strukturbaum nichts. vl stell ich mich gerade super blöd an! ;Dbei mir sieht das so aus------------------Catia V5 R26
|
| In das Form CATIA V5 Kinematik DMU wechseln |
 |
CATIA V5 Kinematik DMU : Wertetabelle
moppesle am 17.03.2017 um 11:30 Uhr (1)
Hallo Vaxl,du mußt die Relation Sets in den Tools/Optionen einschalten. ------------------Gruß UweAuch Catia ist nur ein Mensch!
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Wertetabelle
Vaxl am 17.03.2017 um 13:28 Uhr (1)
ich muss ehrlich sagen, ich hab die andere variante nicht wirklich umsetzen können. habs jetzt mit den bedingungen eh geschafft, nachdem ich sie gefunden hatte dankevaxl------------------Catia V5 R26
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Robotersimulation
thomasacro am 19.04.2017 um 20:01 Uhr (1)
Hallo Gena.Es ist immer schwierig bis unmöglich bei der Kinematik sachen zu greifen, mitzunehmen und loszulassen.Catia bewegt immer alle Teile, die in einem Mechanismus verbaut sind gleichzeitig. Leider ist es nicht auf simple Art möglich mal eine Verbindung zu haben, dann aber nicht mehr und umgkehrt.Wie ich es dann immer mache: Ich erzeuge mir zwei Simulationen, die ich dann gleichzeitig ablaufen lasse. Zum einen der Roboter ohne Werkstück, dann Nur das Werkstück. Das Timing ist dann so gewählt, dass bei ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Übertragungswinkel Nutenscheibe
Jonaslang am 23.04.2017 um 17:39 Uhr (1)
Servus zusammen,Ich versuche im Moment vergeblich, den Übertragungwinkel zwischen einer Nut und einer Rolle während der Kinematik-Simulation zu messen. Das Problem ist hierbei, die Winkelmessung zwischen der Nut und Rollenradius im Kontaktpunkt zu erstellen. Gibt es einen Trick in Catia Hilfsgeometrien für Messungen zu ertellen? Ich benötige eigentlich nur eine Linie vom Rollenmittelpunkt zum Kontaktpunkt zwischen Rollenumfang und der Nutfläche. Ich habe bereits auch versucht eine Linie in die Rolle zu zei ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
 |
CATIA V5 Kinematik DMU : Bedingungen in der Kinematik-Umgebung
ffp19 am 26.04.2017 um 14:38 Uhr (15)
Hallo zusammen, ich arbeite zur Zeit an einem Delta-Roboter. Dafür habe ich in Catia ein kinematisches Modell, in dem ich über einen Regler die drei Säulen vertikal verstellen kann, sodass sich die Lage des TCP ändert. Jetzt möchte ich die einzelnen Arme in ihrer Länge verändern, um so die Unterschiede festzustellen, im dem sich die Position des TCP nach der Translation der einzelnen Säulen verändert. So sollen Auswirkungen von Fertigungsfehlern (unterschiedliche Längen der Arme) dargestellt werden. Ich ka ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : U-Joint mit freien Achsen
EngCon am 09.05.2017 um 09:38 Uhr (1)
Hallo zusammen,Ein Drehgestell aus Fahrwerk, Rahmen und extra Bruecke (Bolster) soll unter einem Wagen auf einer Schiene laufen.http://www.siemens.co.in/pool/press/news_archive/sf_300big.jpgDas Drehgestell macht dabei alle Bewegungen der Schiene mit; also alle 3 Rotationen, rollen, kippen, drehen. Die Bruecke dreht sich jedoch nur gegenueber dem Wagenkasten um die Vertikalachse.Fuer meine Analyse habe ich das Drehgestell in drei Hauptbaugruppen unterteilt:Fahrwerk, Rahmen und Bruecke. Fahrwerk und Rahmen i ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Fitnessgerät Kinematik
Lionel Hutz am 26.05.2017 um 10:31 Uhr (1)
Was bewegt sich denn schon?Wie weit hast du deine Kinematik aufgebaut?Eine Seilumlenkung kannst du glaube ich aus zwei prismatischen Verbindungen erstellen. Da gibt es unter den Joints einen Button.Welche Catia-Version benutzt du (bitte Systeminfo ausfüllen)?Edit: Für bessere Hilfestellung blende bei Screenshots bitte den Strukturbaum ein, dass der Aufbau der Kinematik erkennbar ist.[Diese Nachricht wurde von Lionel Hutz am 26. Mai. 2017 editiert.]
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : KUKA Roboter Simulation
andee am 17.10.2017 um 10:30 Uhr (1)
Hallo Zusammen! Ich bin Andreas und seit kurzem an meiner Maschinenbau Bachelorarbeit im Bereich Roboter Simulation beschäftigt.Nachdem ich jahrelang stiller Mitleser war, habe ich heute beschlossen mich im Forum anzumelden. Ich hoffe, dass bei meinem Problem weitergeholfen wird und ich in Zukunft auch die ein oder andere Frage beantworten kann. Ich habe in CATIA DMU Kinematiken einen 6 Achs KUKA Roboter erstellt, welcher sich über die einzelnen Achswinkel, innerhalb deren Grenzen steuern lässt. Die 7. Ach ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : KUKA Roboter Simulation
andee am 17.10.2017 um 11:57 Uhr (1)
Servus BerndDiesen Thread habe ich auf meiner Recherche bereits komplett durch. Auch deine 3dxml habe ich mir schon angeschaut. Leider habe ich nicht ganz verstanden wie du vorgegangen bist. Zusätzlich ist mir überhaupt nicht klar wie der Roboter der Bewegung des Tools, also des Ende der Vektorkette folgen soll und gleichzeitig seine Achsbeschränkungen beachtet. Eventuell könntest du mir das Vorgehen für einen absoluten Catia DMU Anfänger beschreiben. Vielen herzlichen Dank für deine Hilfe!
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Kinematic von Passstift und Nut
moppesle am 16.11.2017 um 07:34 Uhr (1)
Hi TW1393,hast du es schon mal mit einer Punkt-Kurveverbindung probiert?------------------Gruß UweAuch Catia ist nur ein Mensch! [Diese Nachricht wurde von moppesle am 16. Nov. 2017 editiert.]
|
| In das Form CATIA V5 Kinematik DMU wechseln |
|
CATIA V5 Kinematik DMU : Mehrgelenk scharnier
akfrom77 am 28.01.2018 um 15:02 Uhr (1)
Hallo Catia Freundeerst mal möchte ich mich hier bedanken für so tolles Forum.Ich mache gerade was mit Catia Kinematik.Ich hätte da ein kleines Problem mit der Kinematik bekomme es nicht zu laufen .Kann mir eventuell eine von euch helfen?Die Gelbe Linie ist der Fix Bauteil.Magenda-ScharnierarmBlau-Scharnier arm wird aber geführt entlang der roten LinieBraun hängt am blauen scharnierarm und der vordere Bereich ist eine klappe der hier nicht zu sehen ist.als vier gelenk ist es kein Problem es aufzubauen nur ...
|
| In das Form CATIA V5 Kinematik DMU wechseln |